
www.industriogteknik.com
14
'22
Written on Modified on
HMS Industrial Networks: Kør videre
Kommunikations- og sikkerhedsudfordringer for fabrikanter af mobile robotter. Mobile robotter findes overalt - fra lagerlokaler til hospitaler og selv på gaden. Det er nemt at forstå deres popularitet: De er billigere, sikrere, nemmere at finde og mere produktive end rigtige medarbejdere.

De er nemme at tilpasse eller kombinere med andre maskiner. Da mobile robotter indsamler en masse realtids data, kan virksomhederne bruge mobile robotter til at få gang i deres IoT.
Men for at kunne arbejde effektivt skal de mobile robotter bruge sikker og pålidelig kommunikation. Denne artikel beskriver de vigtigste kommunikations- og sikkerhedsudfordringer, der opstår for fabrikanter af mobile robotter, og anviser en nem måde at imødegå disse udfordringer for at holde de mobile robotter kørende.
Hvad er mobile robotter?
Før vi begynder, så lad os lige definere hvad vi forstår ved mobile robotter.
Mobile robotter transporterer materialer fra et sted til et andet, og findes i to udgaver: Automatiserede, styrede køretøjer (AGV, Automated Guided Vehicles), og autonome, mobile robotter (AMR).
AGV'er anvender infrastruktur til styring (wire reflektorer, reflektorer eller magnetiske strips) til at følge forudbestemte ruter. Hvis der er en forhindring på en AGV's vej, stopper AGV 'en og venter indtil forhindringen fjernes.
AMR'er er mere dynamiske. De navigerer via kort, og bruger data fra kameraer, indbyggede sensorer eller laserscannere for at se omgivelserne, og vælger selv den mest effektive rute. Hvis der er en forhindring på en AMR's planlagte rute, vælger den en anden vej. Da AMR'en ikke er afhængig af infrastruktur til styring, er de hurtigere at installere, og kan tilpasse sig logistiske ændringer.
Hvilke kommunikations- og sikkerhedsudfordringer møder fabrikanter af mobile robotter?
1. Etablering af trådløs forbindelse
Den første udfordring for fabrikanter af mobile robotter er at vælge den bedst egnede, trådløse teknologi. Det sædvanlige råd er at kortlægge kravene, evaluere standarder, og vælge den bedste løsning. Desværre er dette ikke altid muligt for fabrikanter af mobile robotter, da de ofte ikke ved hvor maskinen skal anvendes, eller kender de nøjagtige detaljer i den endelige applikation.
Sommetider kan en Bluetooth forbindelse være ideel, da den har en stabil forbindelse, der ikke er overfyldt, mens andre applikationer kræver en high-speed, sikker mobilforbindelse. Det, der er brugbart for den mobile robotfabrikant, er at have en netværksteknologi, der er nem at ændre for at kunne tilpasses specifikke krav.
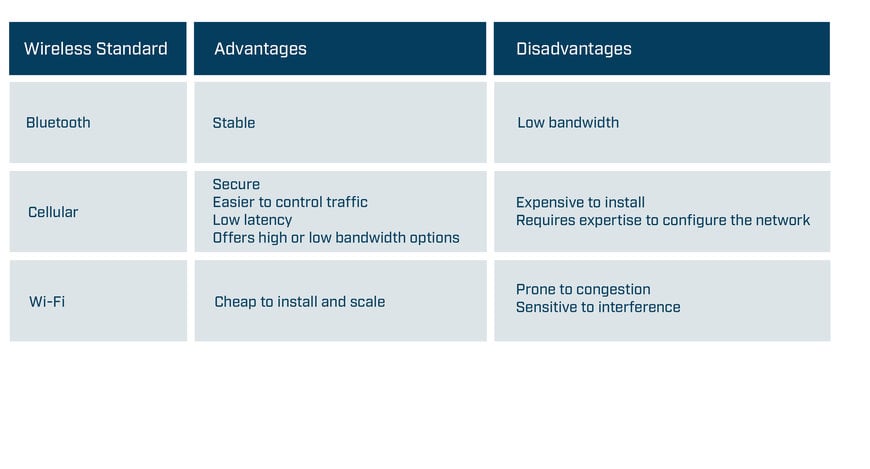
Trådløs standard – fordele og ulemper på højt plan
Den anden udfordring er at sikre, at installationen virker som planlagt. Før installation af en trådløs løsning, skal man foretage en undersøgelse af lokationen (som er forudsigelig), baseret på tegninger for at sikre, at de mobile robotter har tilstrækkeligt signaldækning i hele området. Lokationsundersøgelsen bør identificere de optimale adgangspunkter (AP), den korrekte antennetype, den optimale antennevinkel, og dæmpning af interferens. Efter installationen skal der bruges sniffer værktøjer for at undersøge designet og justere AP'er eller antenner efter behov.
2. Opkobling af mobile robotter til industrielle netværk
Mobile robotter skal kommunikere med kontrollere på det relevante område, selv om de mobile robotter og kontrollere ofte bruger forskellige, industrielle protokoller. For eksempel kan en AGV bruge CANopen, mens kontrolleren bruger PROFINET. Dertil kommer, at mobile robotfabrikanter kan have et ønske om at bruge den samme AGV model et andet sted, hvor kontrolleren bruger et andet, industrielt netværk som f.eks. EtherCAT.
Fabrikanterne skal også sikre, at deres mobile robotter har tilstrækkelig kapacitet til at behandle de krævede datamængder. Den krævede datamængde varierer, afhængig af størrelsen og typen af installationen. Store installationer kan bruge mere data, da rute-algoritmerne skal dække et større område, flere køretøjer og flere, potentielle ruter. Navigationssystemer som eksempelvis vision navigation behandler billeder, og behøver derfor mere kapacitet til behandling end installationer, der bruger andre navigationssystemer - som for eksempel reflektorer. Derfor må fabrikanterner løse de følgende udfordringer:
1. De har brug for en netværksteknologi, der understøtter alle større fieldbus- og industrielle Ethernet netværk.
2. Det skal være nemt at ændre netværksteknologien for at kunne sætte den mobile robot i stand til at kommunikere på det samme, industrielle netværk som kontrolleren – uden at ændre designet af hardwaren.
3. Fabrikanterne skal sikre, at netværksteknologien har tilstrækkelig kapacitet og funktioner til at kunne behandle de krævede data.
3. Lav et sikkert system
At designe et system, hvor mobile robotter sikkert kan transportere materialer, er et kritisk, men udfordrende job. Fabrikanter af mobile robotter skal designe et system, der tager hensyn til alle de forskellige typer mobile robotter, strukturer samt mennesker i miljøet. De må sikre, at de mobile robotter reagerer på udefra kommende handlinger – som at en person åbner en sikkerhedsdør eller trykker på et nødstop, og at netværksløsningen kan behandle forskellige sikkerhedsprotokoller og interfaces. De skal overveje, om AMR'erne kan bevæge sig frit, og dermed styre risikoen for sammenstød. Teknologien, der bruges i sensorer, udvikles hele tiden, og fabrikanterne må nødvendigvis følge udviklingen for at sikre, at deres produkter forbliver så effektive som muligt.
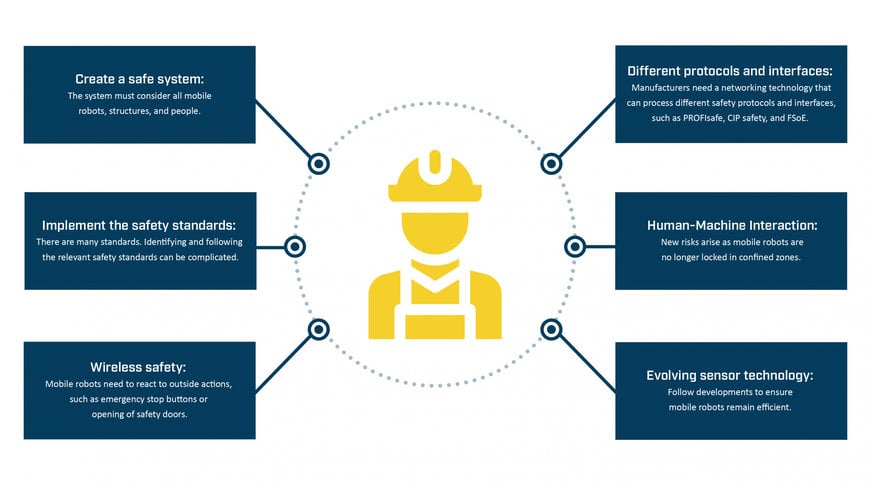
Oversigt over udfordringer for fabrikanter af mobile robotter.
Standarder for sikkerhed
Sikkerhedsstandarderne opstiller retningslinjer for implementering af sikkerhedsrelaterede komponenter, forberedelse af omgivelserne og vedligeholdelse af maskiner eller udstyr.
Mens overholdelse af de forskellige sikkerhedsstandarder (ISO, DIN, IEC, ANSI, osv.) mest er frivillig, skal maskinbyggere i den Europæiske Union lovmæssigt følge sikkerhedsforskrifterne i maskindirektivet.
Maskindirektiv 2006/42/EC er altid gældende for fabrikanter af mobile robotter, og i visse applikationer er direktiv 2014/30/EU også relevant, da det regulerer den elektromagnetiske kompatibilitet i udstyr.
Maskindirektiv 2006/42/EC beskriver kravene for design og konstruktion af sikre maskiner, der indføres på det europæiske marked. Fabrikanter kan kun sætte en CE etiket på, og levere en maskine til deres kunder, hvis de i konformitetsdeklarationen kan bevise, at de har opfyldt direktivets krav.
Selvom de andre sikkerhedsstandarder ikke er obligatoriske, bør fabrikanterne stadig følge dem, da de hjælper med til at opfylde kravene i maskindirektiv 2006/42/EC. For eksempel kan fabrikanterne følge retningslinjerne i ISO 12100 for at reducere identificerede risici til en acceptabel, resterende risiko. De kan anvende ISO 13849 eller IEC 62061 til at finde det krævede sikkerhedsniveau for hver risiko og sikre, at de tilsvarende, sikkerhedsrelaterede funktioner overholder de definerede krav. Mobile robotfabrikanter afgør selv, hvordan de vil opnå et givet sikkerhedsniveau. For eksempel kan de nedsætte farten på den mobile robot for at bringe risikoen for sammenstød og omfanget af kvæstelser ned til et acceptabelt niveau. Eller de kan sikre, at den mobile robot kun kører i separate zoner, hvortil der ikke er adgang for mennesker (defineret som indskrænkede zoner i ISO 3691-4).
At identificere den korrekte standard og implementere kravene er den bedste måde for fabrikanterne til at kunne konstruere et sikkert system. Men som det har vist sig i denne sommer, er det et komnpliceret og tidskrævende arbejde.
4. At sikre en pålidelig CAN kommunikation
En sikker og nemt indført standard siden 1980'erne vokser stadig, baseret på kommunikation via CAN teknologi, mest på grund af dens anvendelse i forskellige, blomstrende industrier – som eksempelvis E-Mobility og Battery Energy Storage Systems (BESS). CAN er enkel og omkostningsvenlig. Alle enheder på netværket kan tilgå alle informationer, og det er en åben standard hvilket betyder, at brugerne kan tilpasse og udvide beskederne efter deres individuelle behov.
At etablere en CAN forbindelse er, for fabrikanterne af mobile robotter, en stadig mere vigtig del, da det sætter dem i stand til i større grad at overvåge de lithium-ion batterier, der bruges i driften af mobile robotsystemer, enten eftermonteret eller i nye installationer. Fabrikanter af mobile robotsystemer bør gøre følgende:
1. Etablere en pålidelig forbindelse til standarderne for CAN eller CANopen kommunikation for at kunne kontrollere deres enheder – som f.eks. at overvåge batteriets status og ydelse.
2. Beskytte systemerne mod elektromagnetisk interferens (EMI), da EMI kan ødelægge elektronikken i et system. Risikoen for EMI er stor i tilfælde af eftermontering, da tilføjelse af nye komponenter, som eksempelvis batterier, ved siden af kommunikationsledninger kan resultere i højfrekvente, elektromagnetiske forstyrreler.
5. Fjerntilgang til mobile robotter
Muligheden for at opnå fjernadgang til en maskines kontrolsystem kan sætte sælgere af mobile robotter eller ingeniører i stand til at fejlsøge og løse de fleste problemer – uden at rejse til lokationen.
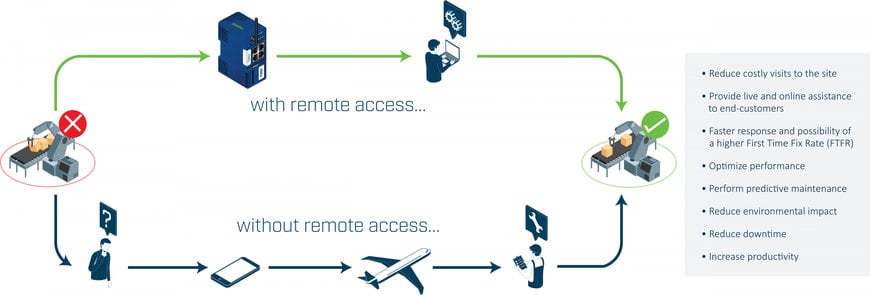
Fordele ved fjernadgang
Udfordringen er at designe løsninger til fjernadgang, der afvejer it-afdelingens behov med behovet hos ingeniørerne eller sælgerne.
It-afdelingen ønsker at sikre sikkerheden i netværket, holde det pålideligt og opretholde integriteten. Derfor skal løsningen til fjernadgang inkludere de følgende sikkerhedsforanstaltninger:
Hellere anvende udgående forbindelser end indgående for at holde belastning på firewall'en på et minimum
Adskille den relevante datatrafik fra resten af netværket
Kryptere og beskytte al datatrafik for at sikre fortrolighed og uafhængighed
Sikre, at sælgerne arbejder i overenstemmelse med, eller er certificerede til, relevante sikkerhedsstandarder som eksempelvis ISO 27001
Sikre, at leverandørerne deltager i regelmæssig sikkerhedskontrol
Ingeniøren eller sælgeren vil have et pålideligt system, der er nemt at bruge. Det skal være nemt for brugeren at koble op til de mobile robotter, og at få fat i den nødvendige information. Hvis installationen ændres, skal det være nemt at ændre antallet af robotter. Hvis de mobile robotter er i et andet land end ingeniørerne eller sælgerne, skal infrastrukturen i netværket have tilstrækkelig dækning og redundans til at garantere global tilgængelighed.
Konklusion
Som vi har set, står fabrikanter af mobile robotter overfor at skulle løse mange udfordringer, når det gælder kommunikation og sikkerhed. De skal etablere en trådløs forbindelse, sende data over forskellige netværk, sikre sikkerheden, forbinde til CAN systemer og kunne have fjernadgang til robotterne. Og for at gøre det endnu mere kompliceret skal hver installation kunne revurderes for at kunne overholde krav på lokationen.
Bedste praksis til implementering af mobil robotkommunikation
Fabrikanter af mobile robotter er sjældent eksperter i kommunikation eller sikkerhed. Derfor kan de finde det tidskrævende og dyrt selv at prøve at udvikle den fornødne kommunikationsteknologi. Ved at inddrage tredjeparts kommunikationsløsninger er det ikke blot en løsning for udfordringerne i den forhåndenværende kommunikation, det medfører også andre fordele.
Moderne kommunikationsløsninger har et modulært design, der sætter fabrikanter af mobile robotter i stand til at fjerne et netværksprodukt, der er designet til en standard eller protokol, og erstatte det med et produkt, der er designet til en anden standard eller protokol - uden at det har indflydelse på andre dele af maskinen. For eksempel kan Bluetooth være den bedst egnede, trådløse løsning i en installation, mens wi-fi måske har bedre dækning i en anden installation. På samme vis kan en lokation bruge PROFINET og PROFIsafe protokoller, mens en anden anvender forskellige protokoller til standarder og sikkerhed. I begge tilfælde kan fabrikanter af mobile robotter bruge kommunikationsprodukter til at ændre netværksteknologien for at kunne overholde lokale krav – uden at foretage ændringer i designet af hardwaren.
Forfattere:
Mark Crossley, Daniel Heinzler, Fredrik Brynolf, Thomas Carlsson
